Min. 5 bar
230V (change on request)
40 -120 wheels/hour
20" - 29"
675 kg
80 L/min
1.5 kW
(L x W x H): 1050 x 1300 x 1750 mm
50 mm
<70 dB
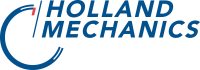
Introducing the revolutionary Quattro Tightening & Trueing Robot, proudly brought to you by Holland Mechanics and backed by a world-patented technology. Designed to elevate your wheelbuilding process to unparalleled heights, the Quattro empowers customers with a seamless and efficient production journey, delivering consistently precise results with every use.
Experience the epitome of lean production with the Quattro, where predictable wheel trueing times become a reality, streamlining your operations and optimizing throughput. Seamlessly integrating into existing lines, this cutting-edge robot not only accelerates production but also ensures unparalleled accuracy and reliability throughout the process.
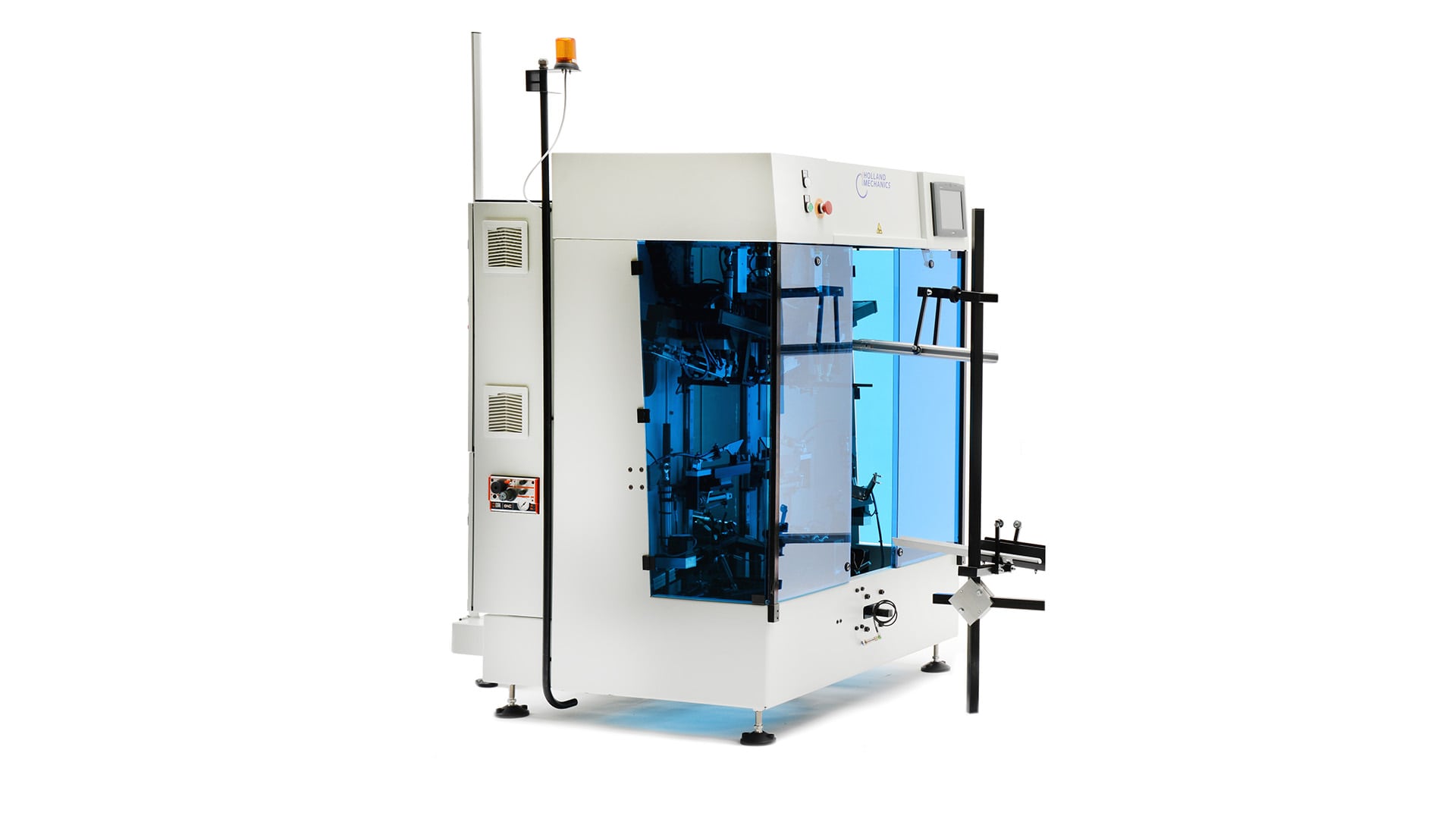
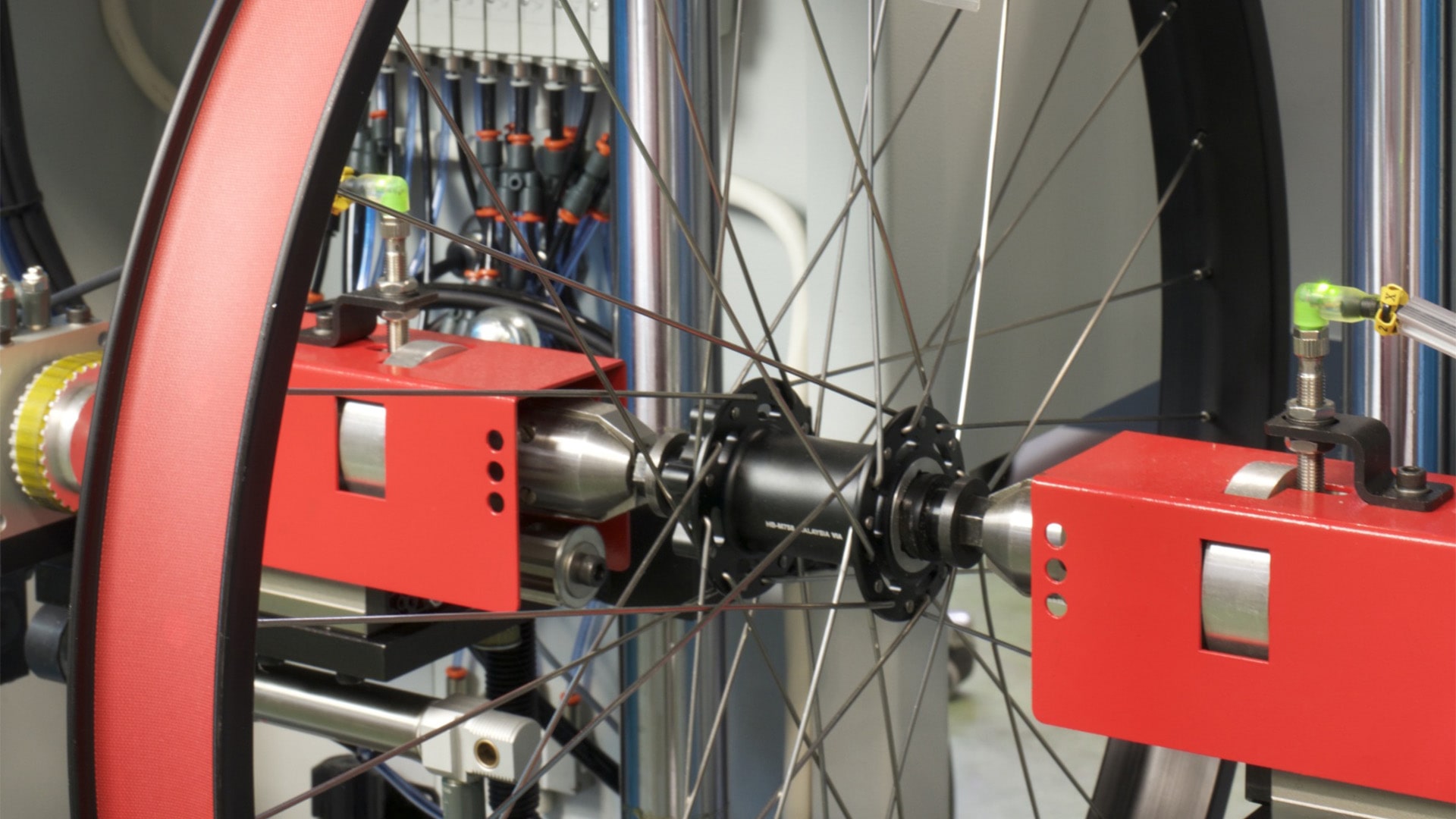
Equipped with advanced self-balancing software, the Quattro effortlessly transitions between tightening and trueing modes, adapting to your production needs with unparalleled agility. Its innovative design features four nipple hands, meticulously tightening every spoke to perfection, leaving no room for loose ends.
But the Quattro doesn’t stop there. In its fully automatic change-over version, it offers unparalleled flexibility, allowing for seamless transitions between different production runs with ease. Plus, with 100% inline quality control, you can trust that every wheel meets the highest standards of excellence, ensuring customer satisfaction and loyalty.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}